A UAV gimbal payload buyer rarely struggles because it cannot find a thermal camera module or a laser rangefinder module. It struggles because it evaluates those modules as separate components instead of as one payload architecture. A thermal module may look excellent on a bench. An LRF module may return stable ranging in a sample setup. But once both have to live inside a stabilized airborne payload, the real questions change: can the aircraft carry the weight, can the gimbal keep the line of sight stable, can the software trust the timing, can the operator trust what the payload is measuring, and can the supplier support the project from sample to pilot build? Those are system questions, not catalog questions.
Table of Contents
ToggleThat is exactly why this topic is worth writing. Your site already has several strong building blocks around UAV use cases for thermal imaging, UAV NUC strategy, thermal module OEM selection, thermal module integration, LRF integration, LRF configuration, eye-safe LRF design, and OEM development kits. What it does not yet do in one single place is answer the full buyer question for UAV gimbal payloads: how should a serious B2B team choose the thermal module and the rangefinder together, what trade-offs matter most, and what kind of supplier support actually reduces project risk?
In other words, this is not a consumer drone topic. It is an OEM and integration topic. The right reader is a gimbal-payload developer, drone-system integrator, robotics team, inspection-platform company, public-safety solution provider, or mapping payload brand. That reader does not simply want to know whether thermal imaging or laser ranging works. It wants to know how to choose a payload architecture that survives engineering, validation, and commercialization.
Start with the mission, not the sensor list
The first design mistake is to begin with a sensor shopping list. Many teams say they need a thermal camera module, then later decide whether to add an LRF. That approach feels practical, but it often leads to the wrong payload.
The better sequence is to define the mission first. Your existing UAV thermal-imaging article already shows how different missions place very different demands on the payload: search and rescue, law-enforcement overwatch, powerline and rooftop inspection, maritime and coastal watch, disaster assessment, and other aerial tasks do not reward the same module stack in the same way. A payload for infrastructure inspection may need stable thermal detail and clear anomaly context. A public-safety payload may need fast scene understanding and reliable ranging to likely objects of interest. A mapping or robotics payload may care more about time alignment, metadata, and repeatable slant-range information than about a “hero image” alone.
Once the mission is defined, the module decision becomes much clearer. Some UAV payloads really do need thermal imaging only. Others become significantly more useful when thermal and LRF are paired. Some need radiometric thermal measurement, while others only need imaging. Some need a narrow, longer-range LRF architecture. Others need a shorter-range but easier-to-use ranging layer with tighter payload constraints. The important thing is that the mission should choose the stack, not the other way around.
What the thermal camera module must solve in a UAV gimbal payload
A thermal camera module in a UAV payload has to solve more than image generation. It has to deliver usable scene information in an airborne platform where movement, altitude, vibration, wind, power variation, stabilization errors, and operator workload all put pressure on the image chain. Your thermal module product page already positions the module as ready to integrate for UAV, security, inspection, and outdoor applications, which is a good starting point. But UAV payload buyers need to go several steps deeper than that.
The first issue is resolution. Higher resolution is attractive, but in a UAV gimbal it only creates real value if the rest of the payload can preserve that value. A higher-resolution core can improve scene detail, digital zoom usability, target discrimination, and confidence at safer standoff distances, but it also influences bandwidth, processing load, storage, and sometimes cost tier. Your thermal OEM guide and related sensor-selection content both make the point that module choice should follow the actual use case rather than brochure logic. In UAV work, that matters even more, because pixels must remain useful under motion and at changing slant angles.
The second issue is sensitivity. In airborne applications, contrast can be marginal or highly variable. Roofs, power assets, vehicles, vegetation, water, people, and terrain do not all present the same thermal signature. A module that looks fine in a controlled demo may be much less valuable when the aircraft is moving and the operator must interpret weak contrast quickly. That is why NETD and real usable contrast still matter commercially, even when buyers are naturally attracted first by resolution.
The third issue is optics. Lens selection determines what the payload can actually see and how usable the image remains in flight. Your site already has guidance on choosing thermal lenses for security and UAV use, as well as a dedicated article on germanium versus chalcogenide optics. Those pages are especially important for gimbal buyers because optics are not only an image-quality decision. They are also a SWaP, durability, and cost decision. A lens choice that improves transmittance may add mass. A lighter optical stack may help gimbal balance and endurance. A cheaper optical path may hurt image clarity at the exact moment the user needs confidence. In UAV payloads, optics and platform behavior are inseparable.
The fourth issue is frame continuity, which is where your UAV NUC article becomes uniquely valuable. Shutter strategy and non-uniformity correction are not background engineering trivia in an airborne payload. They can directly change whether the operator experiences a stable visual feed or disruptive recalibration events. In a gimbal payload used for search, inspection, tracking, or real-time decision support, even brief image interruptions can reduce confidence and make the payload feel less mature. Buyers should therefore ask not only about image quality, but also about how the thermal module behaves over time in motion and through NUC events.
The fifth issue is interface and software maturity. A UAV gimbal payload is not a finished handheld device. It is one subsystem inside a larger mission architecture. The thermal integration page on your site explicitly frames success around interfaces, lenses, mechanics, compliance, and pilot-build readiness. That is the right view. A thermal module becomes commercially useful in a UAV only when it can work predictably with the payload controller, video path, metadata layer, ground station, and validation workflow.
The sixth issue is whether the project needs imaging only or true radiometric capability. Your thermal OEM guide already stresses that imaging is not the same thing as temperature measurement. This distinction matters a great deal in UAV payloads. A payload built for awareness, search, or relative anomaly finding may not need radiometric complexity. A payload built for industrial inspection or measured-condition monitoring may. Choosing incorrectly here either inflates cost and validation burden or under-specifies the product for the mission.
What the laser rangefinder module must solve in a UAV payload
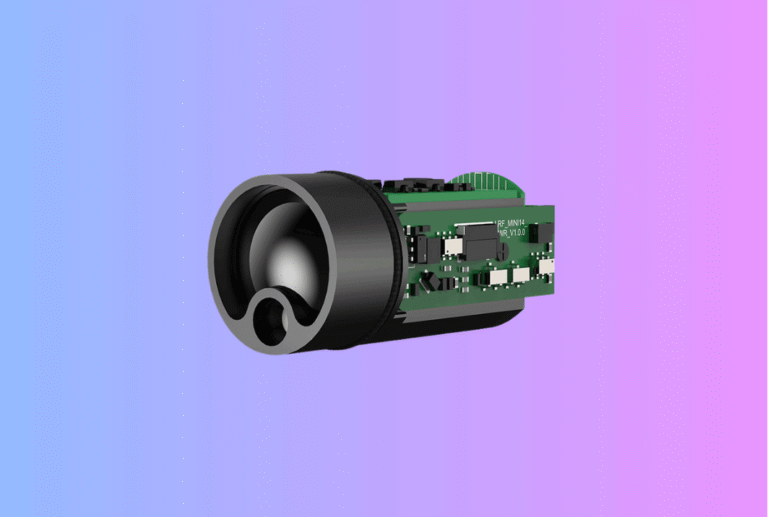
The laser rangefinder module is where many UAV payload teams either create real mission value or create hidden integration debt. A strong LRF choice is not simply a longer-distance choice. It is a systems choice involving range class, beam divergence, eye safety, interface path, timing behavior, and optical alignment.
Your LRF product page already states that the modules are configurable by range, accuracy class, beam divergence, and optics package, and that they can be supplied with UART, RS232, RS485, USB, and CAN plus SDK support. That is exactly how a UAV buyer should evaluate them. A gimbal payload does not need “the most powerful rangefinder” in the abstract. It needs the rangefinder whose optical behavior, interface options, and platform fit match the actual mission and aircraft constraints.
Range class matters, but only in context. A buyer that asks first for the longest possible range often ends up with a payload that is harder to balance, more power-hungry, or less practical to validate. A buyer that asks instead what range is operationally useful for its real flight altitude, scene types, operator workflow, and stabilization accuracy is much more likely to choose well. In some payloads, the LRF exists to support target confirmation and slant-range context. In others, it supports mapping, metadata, or cueing logic. In each case, “longest range” may not be the right commercial answer.
Beam divergence matters just as much. A UAV is a moving platform. The payload line of sight is always subject to motion, correction, and background complexity. Too narrow a beam can make the payload less forgiving under motion or aim jitter. Too wide a beam can include unwanted background or reduce target discrimination. Your rangefinder integration page explicitly treats beam and optical path as engineering choices that should be set early, and that principle is highly relevant in gimbal payloads.
Interface and timing maturity matter as well. The LRF page offers several bus options, while the integration page emphasizes sync and trigger support. Those details are not just convenience features. In UAV payloads, the rangefinder often has to coexist with a gimbal controller, payload computer, GNSS or IMU timing source, and video or mission software that expects clean state transitions. An LRF that only returns a raw number but does not integrate cleanly into timing-aware workflows can create more work than value.
Eye safety is another topic that becomes more commercially important in UAV deployments than many buyers expect. Your eye-safe design guide specifically includes UAV payloads that must operate over people or in urban contexts, and references electrical and interface considerations including UART, USB, CAN, MAVLink, and SDK. For public-safety, municipal, utilities, and inspection payloads, eye-safe architecture can be part of deployment practicality, not merely a compliance footnote.
Why thermal plus LRF creates more value than either module alone
The commercial value of pairing a thermal camera module with a laser rangefinder module in a UAV gimbal payload is not simply that the payload gets “two sensors instead of one.” The value is that the payload moves from observation to measured observation.
Thermal imaging helps the operator see what visible light may miss. The LRF helps the operator understand how far that point of interest actually is. When these two layers work together, the payload can become much more useful for target confirmation, incident response, inspection annotation, geospatial context, and downstream analytics. That is especially true when the payload is being used by B2B customers who need more than beautiful footage. They need actionable output.
This is also where many suppliers fail to create enough value. They are willing to sell a thermal module and an LRF module, but they do not help the buyer think through how the two should coexist in the payload. A stronger supplier discussion should cover optical alignment, timing relationships, data paths, power budget, integration documents, development kit support, and validation strategy. Your thermal and LRF integration pages already present those as core OEM topics, which means you have real authority to address them in one combined UAV article.
Co-boresight is not optional in a serious payload
If there is one engineering topic that UAV gimbal buyers often underestimate, it is co-boresight. The payload is not only generating an image and a distance number. It is trying to produce the distance of what the operator believes the payload is viewing.
Your newer LRF mechanical integration article makes the point clearly: boresight should be treated as a controlled engineering outcome, not a vague calibration afterthought. In UAV payloads, this matters even more because flight motion, stabilization effort, thermal drift, and mechanical variation all put pressure on alignment. If the thermal line of sight and the ranging line of sight do not remain sufficiently consistent, the payload quickly loses credibility. The problem is not only technical error. It is user trust.
A payload buyer should therefore ask early how co-boresight is established, how it is verified, how it is protected through temperature and vibration, and whether the supplier can support that relationship through pilot build rather than only in a bench demo. This question alone often reveals whether the supplier is thinking like a component seller or like a payload engineering partner.
Timing and metadata discipline are just as important as optics
The second major source of hidden payload risk is timing. A UAV payload that combines thermal video, ranging, gimbal state, and aircraft data becomes far more useful when those elements are synchronized well enough that software and operators can trust the result.
This point is already hinted at across your site. The LRF integration page highlights sync-trigger support. The blog index shows specific interest around PRF and time sync with GNSS/IMU for laser rangefinder modules. The development-kit page emphasizes that buyers judge a supplier by how quickly they can get useful data on the screen and answer integration questions. Those facts add up to a critical commercial point: timing-aware integration is not just a nice extra for UAV payloads. It is one of the things that separates a demo from a deployable product.
A payload team should therefore ask how the thermal stream, LRF event, and system metadata will be associated. Will the product simply show range on screen, or will it log range with the video and aircraft state? Does the mission computer need to know whether the range is fresh, stale, or uncertain? Is the payload expected to support inspection reports, mapping records, or event review? If so, timing and metadata discipline should be designed at the same time as sensor selection, not after. That is a source of differentiated value because many buyers realize it late.
SWaP is the selection filter, not the post-selection compromise
Many buyers still treat SWaP as a painful trade-off that appears after the “best” modules have been chosen. That is backwards for UAV gimbal payloads.
In reality, SWaP should be the first filter. Every decision about thermal resolution, lens material, thermal housing, front optics, rangefinder optics, interface electronics, mounts, and shielding changes what the aircraft and gimbal must carry. Your thermal module page already positions the module as suitable for UAV payloads, while your optics content makes clear that lens-material choices affect weight, cost, and durability. The implication is straightforward: image performance, ranging performance, gimbal balance, and endurance must be considered together.
This is exactly where a supplier can create unusual value. A supplier that only quotes a thermal core and an LRF module separately forces the buyer to solve the SWaP problem alone. A supplier that discusses optics package, lens material, divergence, enclosure assumptions, and interface implications as one payload decision is much more useful to a serious UAV customer.
Validation matters more in UAV payloads than in many ground products
A UAV payload buyer should never advance on demo performance alone. Airborne systems magnify weakness. Motion, temperature, battery variability, vibration, and operational uncertainty all compress the margin for error.
That is why the newer article cluster on your site is commercially powerful. You now have a thermal OEM guide, thermal integration guide, LRF integration checklist, LRF power and EMI guide, LRF mechanical guide, LRF interface guide, acceptance planning, environmental planning, and development-kit content. Those pieces all support one strong message: a module should not be judged only by first light. It should be judged by how well it supports engineering, validation, and controlled scaling. That is exactly the kind of value proposition UAV payload customers respect.
For UAV gimbal payloads, validation should at least cover image continuity, power stability, startup behavior, interface predictability, co-boresight stability, range behavior under motion assumptions, and enough environmental confidence to support actual field deployment. A supplier that can discuss those topics early is much easier to trust than one that only provides a strong quote sheet.
What B-class UAV buyers actually care about
This is where the article can give readers unique value. B-class buyers usually do not think in academic sensor language. They think in project language.
They want to know whether the payload can support multiple missions without forcing a full redesign. They want to know whether the supplier can help their team move quickly from sample to engineering integration. They want to know whether the interface and SDK are mature enough for a small or mid-sized team to handle. They want to know whether the module stack can survive validation without endless redesign. They want to know whether pilot quantities are possible without painful MOQ barriers. And they want to know whether the supplier’s document pack, development kit, and integration support are good enough to keep their own schedule moving. These are exactly the kinds of issues your LRF page, integration pages, and development-kit page already emphasize.
That means your unique value proposition in this article should not simply be “we have thermal modules and LRF modules.” A much stronger proposition is “we help UAV gimbal payload teams reduce architecture risk, integration ambiguity, and validation delay.” That is a more defensible B2B position, and your current content base already supports it.
A practical selection framework for UAV gimbal payload buyers
The cleanest way for a buyer to make progress is to use one framework across the whole payload decision.
| Decision area | What the buyer should ask | Why it matters |
|---|---|---|
| Mission profile | Search, inspection, mapping, public safety, maritime, utilities, mixed use? | Defines whether thermal only, thermal + LRF, or thermal + radiometry + LRF is needed |
| Thermal module | Resolution, NETD, optics, FOV, NUC behavior, SDK, radiometry? | Determines scene usefulness and operator confidence |
| LRF module | Range class, divergence, accuracy, eye safety, interface, timing? | Determines whether ranging is operationally useful or only a brochure feature |
| Payload integration | Total SWaP, co-boresight, power, timing, metadata, gimbal balance? | Determines whether the payload can actually be stabilized and trusted |
| Validation path | Acceptance, development kit, environmental plan, pilot readiness, file control? | Determines whether the project can move beyond demos without surprise delay |
This framework is not theoretical. It is essentially the combined logic already distributed across your UAV use-case, UAV NUC, thermal OEM, thermal integration, LRF platform, LRF integration, eye-safe, and development-kit pages. Bringing it together in one article would give UAV payload buyers a much clearer decision tool than a generic drone-thermal blog ever could.
Common mistakes UAV gimbal payload buyers make
The first mistake is choosing sensors before defining the mission. That often produces a payload that looks powerful on paper but is poorly matched to real use.
The second mistake is treating thermal image quality as the only important variable. In UAV gimbals, continuity, optics, software behavior, and integration discipline matter almost as much as image quality itself.
The third mistake is adding LRF late as a feature instead of designing around it early. This leads to alignment, timing, and power problems that are harder to solve after the payload concept is already frozen.
The fourth mistake is ignoring SWaP until after the module shortlist is already fixed. By then, the team often has to compromise in a rushed and suboptimal way.
The fifth mistake is over-trusting demos and under-planning validation. A payload that works in a bench video is not automatically ready for real flight, field use, or pilot build.
The sixth mistake is evaluating suppliers only by hardware specifications rather than by engineering support, document quality, development kits, and integration maturity. In OEM programs, those softer-seeming factors often decide who actually gets to launch on time.
What a strong supplier should deliver beyond the modules
A strong supplier should reduce four categories of risk.
It should reduce technical-fit risk by helping the buyer choose the right thermal stack, optics, NUC behavior, range class, divergence, and safety posture for the actual mission.
It should reduce integration risk by clarifying electrical I/O, interface behavior, optics and mechanics, timing assumptions, and validation strategy.
It should reduce evaluation risk by providing a useful development kit, sample-code path, and enough documentation for the buyer to move quickly.
It should reduce scale-up risk by supporting pilot runs, traceability, controlled documentation, and production-oriented thinking rather than stopping at the sample stage.
That is the real unique value proposition this kind of article can express. Not “we sell parts,” but “we help UAV payload teams build a payload architecture that can actually survive the path from sample to deployable product.”
Conclusion
A UAV gimbal payload buyer should not choose a thermal camera module and a laser rangefinder module as though it were assembling a shopping cart. It should choose them as one airborne sensing architecture.
Thermal imaging solves the visibility problem. The LRF solves the distance-context problem. But the payload only becomes commercially strong when optics, NUC behavior, co-boresight, timing, SWaP, interface maturity, validation, and supplier support all line up. That is why this article is worth writing, and why it can offer real value to B2B readers: it addresses the actual decision they are making, not only the individual modules they are browsing.
FAQ
Do all UAV gimbal payloads need both a thermal camera module and a laser rangefinder module?
No. Some missions only need thermal imaging, while others gain major value from adding range information. The right choice depends on the mission, software workflow, and payload architecture.
Is the highest thermal resolution always the best choice for a UAV payload?
Not necessarily. Resolution must be weighed against optics, bandwidth, processing, SWaP, and actual use distance.
Why does NUC strategy matter so much in UAV payloads?
Because recalibration behavior can affect video continuity, operator confidence, and the usefulness of the payload during real missions.
What matters most in choosing an LRF for a UAV gimbal?
Usually not raw maximum range alone. Range class, beam divergence, eye safety, interface, timing, and optical fit all matter.
What is the biggest sourcing risk for UAV payload buyers?
One of the biggest risks is evaluating modules in isolation and underestimating integration, timing, validation, and documentation maturity.
CTA
If your team is developing a UAV gimbal payload and comparing thermal-only versus thermal-plus-LRF architectures, the fastest way to reduce project risk is to discuss the mission profile first and the module shortlist second. Start with our thermal camera module and laser rangefinder module platforms, review our thermal camera module integration and rangefinder module integration pages, and then use our contact page to discuss SWaP, optics, timing, co-boresight, validation, and pilot-build support for your UAV payload program.
Related Articles
- Thermal Camera Module
- Laser Rangefinder Module
- Thermal Camera Module Integration
- Rangefinder Module Integration
- Top 10 UAV Use Cases for a Thermal Imaging Module
- UAV NUC Strategy: Thermal Imaging Camera Core Guide
- Thermal Camera Module OEM Guide for B2B Buyers
- What a Good OEM Development Kit Looks Like for Thermal Camera Modules and Laser Rangefinder Modules
- Laser Rangefinder Module Eye-Safe Design & Compliance Guide