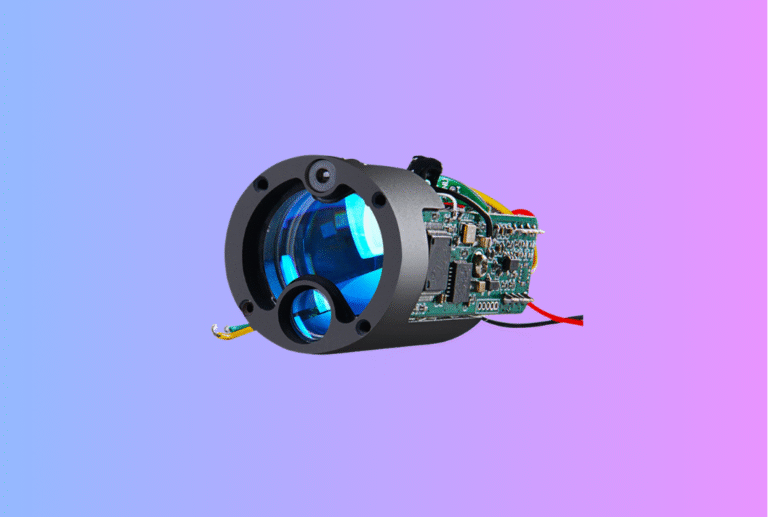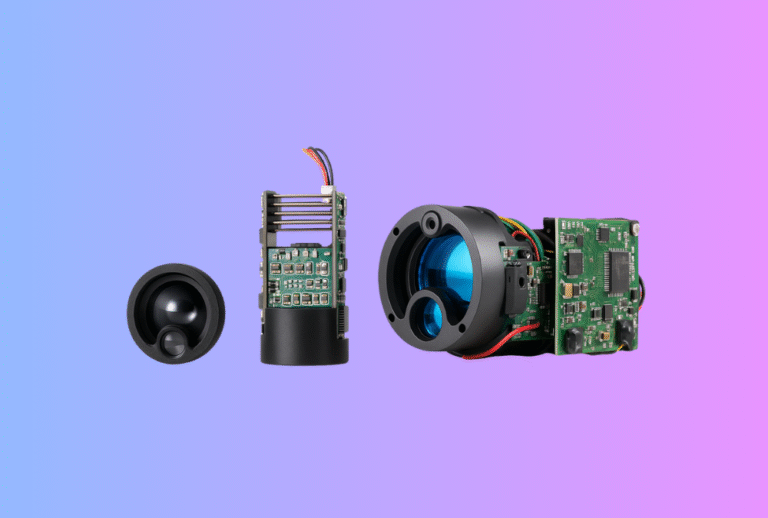
If your FPV rig is fast, light, and flown by feel, the Laser Rangefinder Module you choose must be just as disciplined—safe to demo in public, clean on power, and precise enough to trust on short approaches. This B2B guide walks OEM/ODM integrators through selection criteria that actually survive flight testing and channel reviews.
Table of Contents
ToggleExecutive Summary
- Pick the wavelength for the job. 905 nm modules are smaller and cost-efficient for compact FPV builds; 1550 nm supports higher eye-safe power and tends to maintain range better in fog/rain—often superior in poor visibility.
- Control beam geometry and PRF. Beam divergence and pulse-repetition frequency (PRF) determine near-field usability, aliasing at speed, and OSD smoothness.
- Design for eye safety and public demos. Plan to achieve IEC 60825-1 Class 1 and align US labeling via FDA Laser Notice No. 56—that’s what event venues, insurers, and distributors look for.
- Stabilize the data path. Use event-time timestamps and robust wiring (CAN/isolated UART) so range and confidence don’t “swim” in the HUD; terminate CAN correctly per ISO 11898.
- Make it easy to buy. Standardize your RFQ fields (wavelength, divergence, PRF, range spec, interface, laser class, deliverables) and ask for a short acceptance clip per serial number.
Browse Gemin Optics’ Laser Rangefinder Module lineup. If you plan fused overlays, pair with a Thermal camera module for night work.
Use Cases & Buyer Scenarios
FPV short-range obstacle cueing (3–25 m)
Freestyle/indoor demos and tight roof approaches. You’ll want a wider divergence to avoid dead-zone gaps and a higher PRF for smooth HUD updates.
FPV mid-range standoff checks (20–120 m)
Inspection passes over rooftops, lines, and façades. Choose tighter divergence and stable power rails; consider 1550 nm if you operate in fog/rain frequently.
Public safety / training fleets
Emphasis on Class 1 eye safety, per-serial acceptance artifacts, and clean UART/CAN telemetry for logs and after-action reviews.
Spec & Selection Guide (the heart)
Key parameters, definitions, and why they matter
- Wavelength (905 nm vs 1550 nm)
905 nm is compact and cost-efficient; 1550 nm permits higher eye-safe power and tends to perform better in fog/rain due to atmospheric absorption characteristics—often resulting in longer usable range in adverse weather. - Beam divergence (mrad)
Sets spot size vs distance. Wider beams ease near-field aiming and obstacle cueing; tighter beams enable longer-range precision but demand better boresight stability. - Pulse Repetition Frequency (PRF, kHz)
Higher PRF gives smoother HUD updates at speed; too high can alias with surface reflections or exceed processing headroom. - Receiver & multi-echo
Multi-echo helps penetrate vegetation/haze; expose confidence and number-of-returns to the HUD. - Range & accuracy
Quote reflectivity and weather conditions with distance (e.g., 10 % Lambertian at 100 m, light fog). Avoid “lab only” specs. - Interfaces (UART/CAN/Ethernet)
CAN (ISO 11898) adds noise immunity for multi-node rigs; UART is simplest. Ethernet is handy in fixed FPV nests or companion-computer builds. Proper CAN termination (120 Ω at both ends) is non-negotiable. - Power & peak current
Specify steady-state and inrush; isolate from the VTX rail with LC filtering to avoid banding. - Eye safety class
Aim for IEC 60825-1 Class 1 for public demos and distributor onboarding; in the US, align labels via Laser Notice 56.
Comparison table—two practical FPV archetypes
| Archetype | Wavelength | Beam divergence | PRF | Typical range* | Interface | Eye safety target | Fit |
|---|---|---|---|---|---|---|---|
| Near-field cueing | 905 nm | 2–5 mrad | 5–20 kHz | 3–40 m | UART / CAN | Class 1 | Freestyle, indoor demos, obstacle hints |
| Weather-tolerant standoff | 1550 nm | 0.5–2 mrad | 2–10 kHz | 20–150 m | CAN / Ethernet | Class 1 | Inspection passes, fog/rain resilience |
* Always state reflectivity and environment in RFQ and on the label spec.
Simple decision rules
If flights are fast and close → pick wider divergence + higher PRF at 905 nm.
If operations include fog/rain → favor 1550 nm + tighter divergence (Class 1 power budget).
If EMI or multi-node → use CAN with 120 Ω termination at both ends.
If public demos or venues → require IEC 60825-1 Class 1 + FDA Laser Notice 56 labeling.
Always log event-time range + confidence for stable HUD and after-action review.
Integration & Engineering Notes
Electrical & Interfaces (UART/USB/CAN)
-
Clean rails. LC-filter the LRF rail; keep it off the VTX supply. Log supply mV and peak current during cold starts.
-
CAN layout. Twisted pair, 120 Ω at both ends, minimal stubs, shield/ground per ISO 11898 guidance.
-
Timestamps. Publish event-time with each measurement and retain through the HUD; PRF and OSD frame cadence must be synchronized for smooth range bars.
Optics & Mechanics (mounting, alignment, sealing)
-
Boresight. Use V-groove/dowel datums; verify two-distance zero (near/far).
-
Windowing. If enclosed, spec AR coatings; ensure the clear aperture does not clip the beam at maximum gimbal angles.
-
Vibration. Elastomer standoffs tuned to your frame spectrum; avoid over-soft mounts that shift boresight.
Firmware/ISP/Tuning (filters, multi-echo, HUD)
-
Multi-echo policy. Expose strongest and first-return with confidence and status (e.g., saturation).
-
Range smoothing. Use small windowed filters; avoid heavy smoothing that lags at speed.
-
HUD widgets. Distance + confidence bar + “out-of-class” warning if the system derates to maintain Class 1.
Testing & Validation (bench → field)
-
Bench. Verify accuracy against taped targets at 5/25/75/120 m; record reflectivity.
-
Weather tests. In a mist/spray lane (or light fog), compare range retention for candidate wavelengths. 1550 nm often retains more range in adverse conditions. Acceptance. Save a 10–20 s flight clip with OSD distance/confidence and a CSV log per serial.
Compliance, Export & Certifications
-
Laser product safety. Classify to IEC 60825-1; prepare label artwork and user warnings. In the US, FDA recognizes IEC conformance via Laser Notice No. 56—helpful for labeling and documentation alignment.
-
Operational standards context. Public-safety programs often reference NFPA 2400 for sUAS operations; aligning acceptance/training materials can speed approvals.
-
EMC & materials. For channel readiness, maintain a lightweight pack (EMC pre-scan summary, RoHS/REACH statements) alongside laser files for the LRF payload.
Business Model, MOQ & Lead Time
-
Sampling. 2–4 weeks for standard optics; 4–6 weeks for custom divergence/aperture or housing.
-
MOQ. 100–300 pcs baseline (custom optics windows push higher).
-
Deliverables. Module, harness, low-noise buck, mounts, SDK/API, boresight guide, IEC 60825-1 classification and labels, acceptance checklist, and per-serial clip.
Distributor ROI mini-model
| Driver | Before LRF option | After LRF option | Units/yr | Impact |
|---|---|---|---|---|
| Mission aborts at night | 7% | 3% | 1,000 sorties | ↑ completion rate |
| Training time to competency | 6 h | 4 h | — | ↓ onboarding cost |
| NFF returns | 1.0% | 0.5% | 2,000 units | −10 RMAs |
Add-on path: Bundle with Thermal camera module for fused HUD on night missions.
Pitfalls, Benchmarks & QA
Seven common mistakes
-
Ignoring divergence. A too-tight beam misses near obstacles; a too-wide beam crushes long-range precision.
-
Over-cranking PRF. Causes aliasing and CPU load; match PRF to OSD frame cadence.
-
Dirty rails. Shared VTX power causes banding/drops; filter and separate.
-
No CAN termination. Reflections and bus errors; always 120 Ω at both ends.
-
Spec without method. Quote ranges without reflectivity/weather; acceptance becomes subjective.
-
Eye-safety as an afterthought. Class to IEC 60825-1 early; align US labels via Laser Notice 56.
-
No per-serial artifacts. Without a short clip + CSV, RMAs become arguments.
Benchmark recipe (copy-ready)
-
Distances: 5/25/75/120 m; Reflectivity: 10 %/50 % targets; Weather: clear + light fog.
-
Metrics: mean error, std dev, HUD latency vs PRF, multi-echo hit rate, bus errors (CAN).
-
Artifacts: 10–20 s clip + CSV with
t_event, range, confidence, PRF, supply mV.
FAQs
1) 905 nm or 1550 nm for FPV?
Choose 905 nm for compact, cost-efficient builds and short-range cueing; choose 1550 nm when you need higher eye-safe power and better range retention in fog/rain.
2) What beam divergence suits freestyle vs inspection?
Freestyle/indoor: 2–5 mrad to avoid dead-zones. Inspection/standoff: 0.5–2 mrad for precision (ensure good boresight).
3) How fast should PRF be?
Enough to keep the HUD smooth at your typical speed—often 5–15 kHz. Too high adds jitter and processing load.
4) Do I need CAN, or is UART fine?
UART is simplest; CAN adds robustness for multi-node or noisy airframes—just terminate with 120 Ω at each end.
5) What paperwork do distributors expect for laser safety?
IEC 60825-1 classification sheet, label artwork, user manual warnings, and for US shipments, alignment to FDA Laser Notice 56.
Share your airframe, target ranges, and demo environment. We’ll propose an FPV rangefinder pack—optics/divergence, PRF, CAN/UART harness, IEC 60825-1 Class 1 labels, and acceptance scripts—plus a path to fuse with our Thermal camera module for night missions. Explore Laser Rangefinder Module to start.