If you integrate payloads for drones/UAVs, adding a proven laser rangefinder module unlocks precise standoff, terrain profiling, and safer automated approaches—without turning your airframe into a science project. This playbook shows integrators how to spec, wire, and validate an OEM bundle that’s Class 1 eye-safe, MAVLink-friendly, and ready for Part 107 operations.
Table of Contents
ToggleWhy an OEM bundle beats ad-hoc payloads
Program risk drops when the “ranging engine” is standardized across gimbals and airframes. An OEM bundle—module + harness + SDK + mounting kit—shortens time-to-first-flight, avoids ground-control hacks, and makes field logs repeatable for customers. On compliance, the most practical path is to design and document IEC 60825-1 Class 1 and use the U.S. FDA’s Laser Notice No. 56 route to market; this recognizes IEC conformance and clarifies labeling/record-keeping for consumer systems, including payloads mounted on drones.
Operationally, your end users fly under FAA Part 107 (commercial sUAS). A clean rangefinder integration doesn’t change airspace rules, but it does help enable safer ops in the regimes Part 107 allows (night / over people categories with conditions) and fits naturally alongside today’s Remote ID expectations.
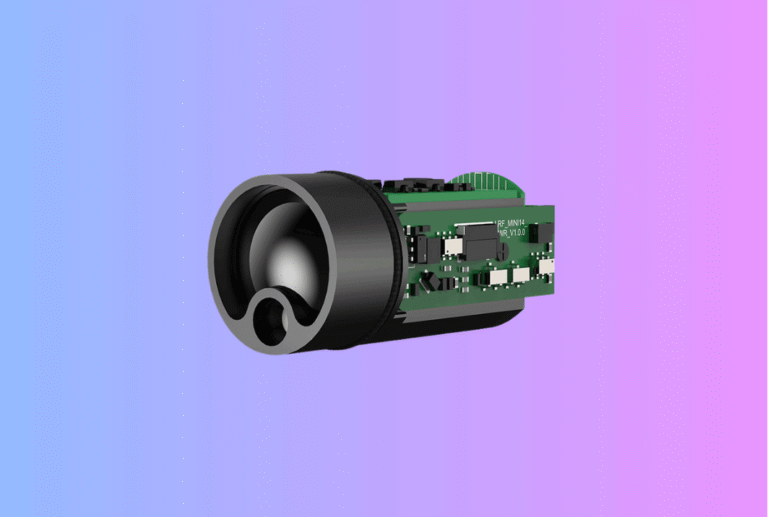
Core payload page: Laser Rangefinder Module
Companion sensing (for fused perception): Thermal camera module
Typical UAV use cases (and what the rangefinder actually does)
Low-altitude mapping & terrain following
Fixed-wing and multirotor platforms use the LRF as a down-looking altimeter near ground, when barometric and GNSS altitude become noisy in gusts and over variable terrain. A narrow divergence reduces vegetation bias during flare or auto-land. Tie the stream to the flight stack via MAVLink distance messages and sanity-check against baro/GNSS.
Inspection standoff & obstacle approach
Utilities and industrial inspection flights need repeatable stand-off from façades, towers, or blades. A forward LRF gives “truth” at the last 10–40 m, where stereo disparity gets sparse and SLAM may drift. Narrower beams avoid sampling behind-target backgrounds.
Precision delivery & UGV hand-off
For BVLOS test corridors or controlled sites, an LRF helps verify ground clearance over brush and slope and assists with handoff to UGVs by ranging known fiducials. Confidence-gated readings prevent “skipping” when the fiducial is partly occluded.
SAR & public safety
Mounted under a thermal gimbal, the LRF adds range-to-subject for LKP (last known point) updates and rescue vectoring at dusk. Fuse the reading with the Thermal camera module centroid so operators see distance next to the thermal box.
Spec & selection guide
Beam divergence & FOV.
Angular spread (mrad) controls the footprint you “paint.” For forward-looking standoff, many integrators start around ~1.5–2.0 mrad (full-angle) to isolate targets; for down-look altimetry over scrub, a slightly taller vertical axis (e.g., ~2.0×1.2 mrad H×V) reads steadier during flare. Match receiver FOV to just envelope the spot at operational ranges (5–60 m typical for approach; 1–10 m for landing aids). Keep definitions consistent (full vs. half-angle; 1/e² vs. FWHM) per optics references to keep vendors honest.
Wavelength & eye safety.
Choose wavelength for system trade-offs, not folklore. You can achieve Class 1 at 905 nm with proper optics and emission budgeting, and document conformance under Laser Notice 56 (IEC 60825-1). Keep label art and AEL worksheets under revision control with your payload CAD.
Interfaces.
Your bundle should present UART (payload control & ranging stream), USB (firmware/logs), and native MAVLink messages for distance and health so it plugs into PX4/ArduPilot without bridge code. MAVLink’s common dialect is the lingua franca for GCS and companion computers.
Latency & confidence.
Publish distance + confidence at ≥10 Hz with <100 ms end-to-end latency so position controllers don’t chase stale numbers. Gate “valid for control” on confidence and recent-sample age.
Environmental & power.
Target −10 °C to +50 °C for public-safety and utility fleets; IP54+ for dust/splash; and a power budget that doesn’t brown-out avionics at throttle transients.
Quick comparison (illustrative—tune for your airframe)
| UAV task | Divergence (full-angle) | FOV match | Range window | Notes |
|---|---|---|---|---|
| Forward standoff / façade | ~1.5–1.8 mrad | Tight | 5–60 m | Avoid background overlap on obliques |
| Terrain following (down-look) | ~2.0×1.2 mrad (H×V) | Match at 5–15 m | 1–30 m | Tolerant during flare |
| Landing aid / pad capture | ~1.5–2.0 mrad | Tight | 0.7–10 m | Confidence-gate below 2 m |
| UGV hand-off / fiducial | ~1.5–2.0 mrad | Tight | 1–25 m | Cluster multi-return near brush |
Integration & engineering notes
Electrical & protocol plumbing
-
UART: commands for mode, rate, and pulse windows; stream returns (distance, strength, confidence).
-
MAVLink: publish DISTANCE_SENSOR / RANGEFINDER (common dialect) with covariance or confidence field; add a health heartbeat so FC can fail-safe.
-
USB: firmware updates, black-box logs for flight-test triage.
Core docs and SDK: Laser Rangefinder Module
Optics & mechanics
-
Boresight the LRF to the gimbal’s EO/thermal axis; store extrinsic calibration so GCS overlays range where the crosshair is.
-
Vibration: use isolators matched to prop RPM; keep the window recessed and AR-coated.
-
Occlusion: for down-look, offset the window from landing legs/UGV clamps to avoid self-occlusion during flare.
Companion sensing (fusion-ready): Thermal camera module
Firmware & ranging logic
-
Multi-return capture & clustering: vegetation causes multiple echoes; choose the closest stable cluster with N-of-M temporal confirmation before flagging “valid for control.”
-
Ambient-aware thresholds: dusk reduces solar NIR background, but mist adds backscatter; adapt thresholds to maintain a steady false-positive rate.
-
Confidence gating: never feed controllers or haptics with low-confidence readings.
Ground control & UX
-
Expose a range ribbon with color/alpha mapped to confidence; show “valid for control” as a discrete status so pilots know when auto-approach engages.
-
Log distance, confidence, and FC mode for post-flight coaching and QA.
Compliance & operations context (what customers will ask)
-
Laser safety: Build to IEC 60825-1 Class 1; in the U.S., Laser Notice No. 56 recognizes IEC conformance and clarifies labeling/records for market entry. Keep a traceable tech file (AEL calcs, labels, test setups).
-
Part 107: Commercial operators must hold a Remote Pilot Certificate, register their aircraft, and comply with operating rules (night/over people/moving vehicles have specific conditions). Your payload doesn’t change that, but clean ranging helps pilots meet operational minima.
-
Remote ID: Effective Sept 16, 2023; FAA ended enforcement discretion March 16, 2024—operators must comply (built-in or module-based). Your integration and wiring should not interfere with Remote ID hardware/antennas.
Field validation you can ship with the bundle
Bench (repeatable optics): two-distance NIR imaging (e.g., 10 m & 30 m) to document divergence (1/e², full-angle) and verify axis ellipticity. Store plots per module serial.
Flight tests (publishable card):
-
Forward standoff: approach a panel from 40 m → 5 m at 0.5 m/s & 1.5 m/s; record range error vs. lidar tape, latency, and confidence.
-
Terrain following: 25 m AGL descent over scrub; log false-lock rate vs. occlusion, and controller behavior at “valid for control” boundaries.
-
Low-light runs: golden hour to civil twilight with and without mist; verify threshold adaptation (steady false-positive rate).
Post-stress: thermal cycle (−10 °C→+50 °C) and vibration dwell at prop fundamental + 2nd harmonic; re-verify boresight and window integrity.
Business model & packaging (for integrators and OEMs)
-
What’s in the OEM bundle: LRF core, gimbal/airframe brackets, flight-rated harness (UART/USB), window & gasket kit, SDK (MAVLink examples), calibration target, and QA checklist.
-
Lead times: pilot kits 2–4 weeks; first-article approval to SOP ~10–12 weeks, then replenishment 4–6 weeks (optics supply dominates).
-
Support: a one-page “Valid-for-Control” protocol, GCS overlay guide, and log-review SOP cut your customer tickets dramatically.
Night/ISR laddering without changing the UI paradigm: Thermal Monoculars and Thermal Binoculars for ground teams using the same range vocabulary.
Pitfalls we see (and how to avoid them)
-
Spec drift via definitions: mixing half-angle/full-angle or 1/e² vs. FWHM across vendors corrupts comparisons—standardize to full-angle 1/e² in every doc.
-
Over-wide FOV: if receiver FOV dwarfs the beam at 10–30 m, façades “win” and you lose standoff precision.
-
Latency blindness: controllers “hunt” when update age isn’t enforced; drop frames older than ~100 ms.
-
Remote ID interference: power routing and window mounts that shadow Remote ID antennas create customer pain—check it on the bench.
-
Paperwork last: leaving Class 1 labeling and AEL math to the end invites rework—build the file alongside flight tests.
FAQs
Is 905 nm eye-safe for drones?
Yes—Class 1 is achievable at 905 nm with proper optics and emission budgeting; document conformance under Laser Notice 56 / IEC 60825-1 and label accordingly.
What’s the simplest way to feed the flight stack?
Publish MAVLink range messages (DISTANCE_SENSOR / RANGEFINDER) at ≥10 Hz with a confidence/covariance field; many FCs/GCS read the common dialect out-of-the-box.
Do we need to change ops for Part 107?
No—the payload doesn’t change rules. Pilots still need a Part 107 certificate, registration, and Remote ID compliance; your integration should avoid RF interference and keep logs useful.
How tight should divergence be for façade work?
Often ~1.5–1.8 mrad full-angle works well with a matched FOV so backgrounds don’t dominate while you creep from 30 m to 5 m.
What proves reliability to procurement?
A one-page flight-test card with standoff error, latency, and false-lock rates across three scenarios (standoff, terrain following, low-light) will do more than a long spec sheet.
Call-to-Action
Ready to ship a drone payload that ranges cleanly, speaks MAVLink, and meets Class 1 with documented math? Our laser rangefinder module OEM bundle includes mounts, harness, SDK examples, and a validation card so your pilots trust the number on day one.
Start here: Laser Rangefinder Module
Fuse with imaging: Thermal camera module · Thermal Monoculars · Thermal Binoculars
Sources
-
FDA — Laser Products: Conformance with IEC 60825-1 (Laser Notice No. 56), Feb 2023. U.S. Food and Drug Administration
-
IEC — IEC 60825-1:2014 Safety of laser products – Part 1 overview (webstore page). IEC Webstore
-
FAA — Part 107 Summary/Regulations & Operations Over People/Night; Remote ID enforcement ended Mar 16, 2024.
-
FAA — Remote ID Toolkit (effective Sept 16, 2023).
-
MAVLink — Common message set & developer docs (PX4/ArduPilot ecosystem).